
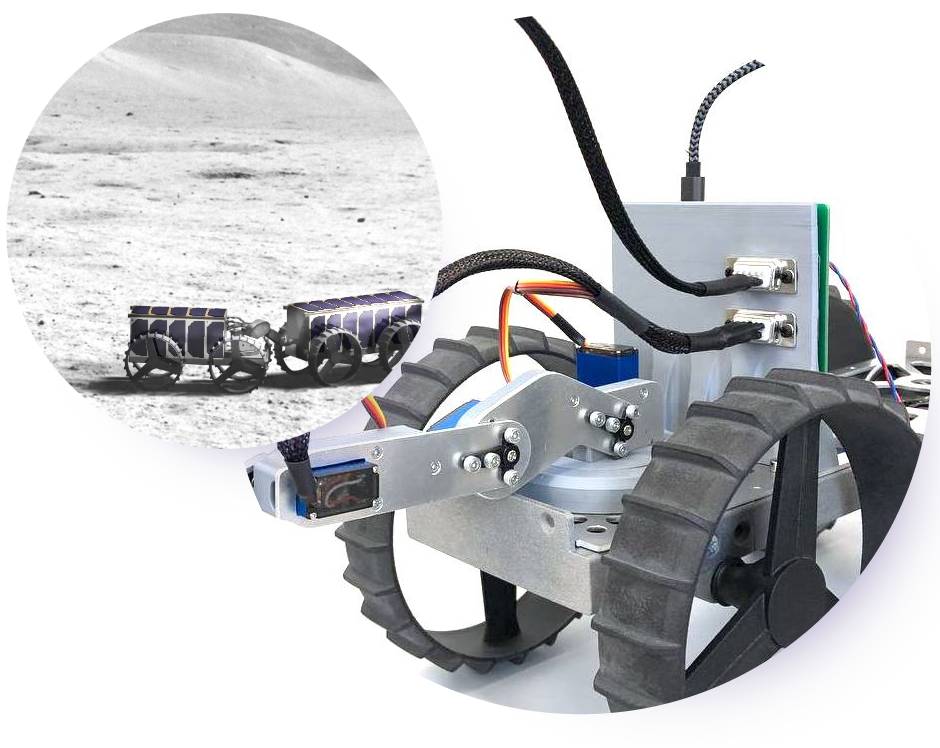
A Robotic Arm for Earth and Space
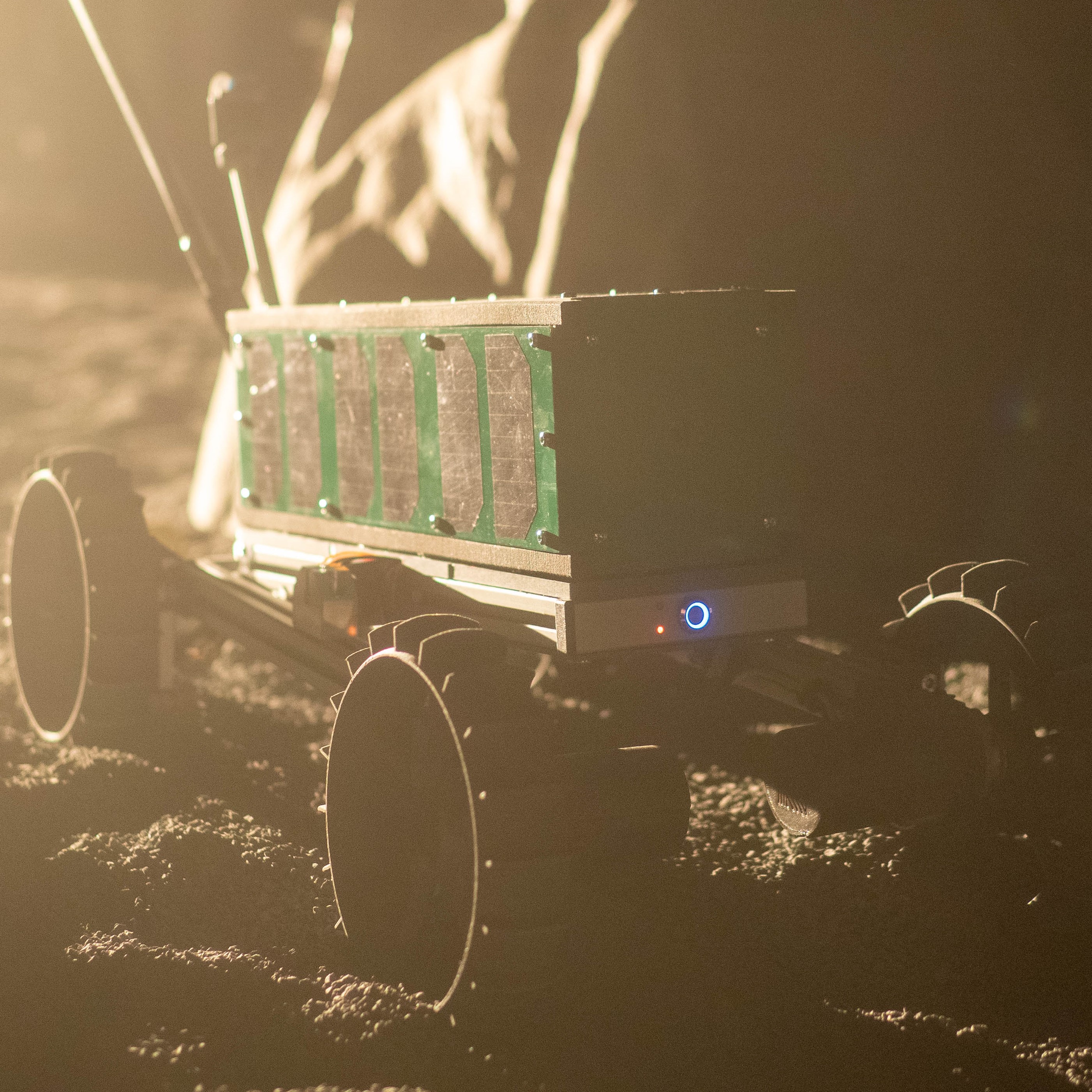
We are among the pioneers of lunar robotics with our rover platform, called HiveR DRIVE, that is based on the CubeSat form-factor. The addition of a robotic arm to such a collaborative rover enables it to interact with the environment, perform maintenance tasks, and deploy other scientific instruments with great accuracy. Therefore, we have developed a compact robotic arm, called HiveR FLEX, with four degrees of freedom that retracts and stores into a volume of 10 cm x 10 cm x 10 cm. In addition to its applicability for lunar exploration, HiveR FLEX has great potential in a variety of terrestrial applications, such as education, research, and industrial operations. Its robust and compact construction makes it suitable for tasks such as object handling, assembly, and inspection.
Meet HiveR
The HiveR ecosystem is based on the idea of offering systems in multiple tiers. This allows for cost-effective development using the lower-tier version, with the option to upgrade to the fully qualified version later on.
T1: Development
T1 is ideal for hands-on education and laboratory research, allowing for algorithm development and experimentation.
T2: Industry
T2 is designed for industrial applications such as automated factory inspection and mining site exploration.
T3: Hazmat
This tier can help emergency relief crews with their response to incidents that require the control and containment of hazardous materials and the decontamination of the site.
T4: Space
T4 is geared towards space exploration and is capable of operating in the harsh conditions on the lunar surface.
The Team
Lennart is responsible for the mechanical and product design of the robotic arm.

Irene is the Founder and CEO of NEUROSPACE GmbH, the company behind HiveR.

Maximilian takes care of the seamless integration of the robotic arm within your robotics project.

Rob is our mission manager. Contact him to get your hardware to the Moon.
The NEUROSPACE team is constantly growing. Check out the full team on our website.